|
 POTENTIAL FIELD DATA REDUCTION AND DISPLAY BASICS
POTENTIAL FIELD DATA REDUCTION AND DISPLAY BASICS
The
acquisition of geophysical data such as gravity, magnetic, and
radiometric can be accomplished aboard aircraft or ships and on
the land surface by survey crews aided by vehicles or
helicopters. In addition to the primary measurement, location
data and surface elevation are gathered digitally. The
resultant mass of data is most efficiently reduced by using
computers with appropriate software, particularly contouring
algorithms that can reliably mimic the shapes of subsurface
features.
Computer methods also allow a significant amount of further data
enhancements to be performed at little additional cost.
Mathematical approaches to estimate regional trends and residual
surfaces, continuations and derivatives are the most common.
These mapping functions are also widely used to display
formation tops and thickness isopachs, seismic structures and
isochrones, and to display the many mappable properties derived
from petrophysical analysis (such as pore volume, hydrocarbon
pore volume, flow capacity, and net pay)
This webpage illustrates the results of gravity and magnetic data
reduction with a number of examples and workflows, ranging across
data acquisition, edit, reduction, and display.
Judicious data edit is the most important factor in obtaining useful
exploration information from these computer systems. Editing can be
greatly helped by using intermediate maps – bulls eyes or strange
kinks in the contours are usually signs of data errors.
MAPPING AND CONTOURING METHODS
An overview
of a generalized mapping and contouring system is shown in the
illustration below.
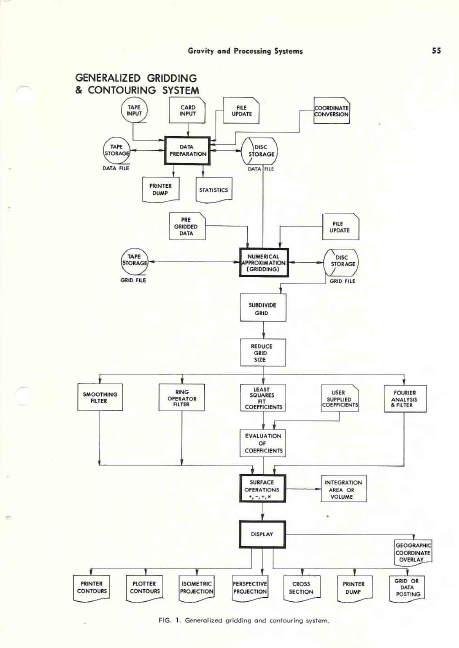
Generalized gridding and contouring system.
The essence of digital processing of three-dimensional geophysical
or geological data is the interpolation of a numerical surface from
the randomly positioned data available after basic corrections and
reduction. This surface is usually sampled at the intersections of
a regular square grid, although rectangular or trigonal grids are
also used. Once in this grid form, the data may be easily operated
on to create new surfaces (e.g. regionals, residuals, continuations,
derivatives, isopachs, etc.). The surface is generally displayed in
the form of a contour map, although many other displays are
possible.
The processing sequence may be broken into four relatively distinct
phases: data formatting, numerical surface creation, numerical
surface operations, and display. See flow chart above.
1)
Data Formatting
The many
different forms of data presented to the system must be placed into
a common format after their initial reduction (pre-processing),
since the numerical surface creation is a mathematical process
independent of the physical meaning of the raw data. The data must
also be sorted on Y co-ordinates within X co-ordinates for the
proper functioning of the gridding routines. This sort and format
are the functions of a data preparation program. It will accept
data in almost any form as input and return as output a standard
DATA FILE format.
Naturally, there are utility routines in the systems to operate upon
the data file. Transfer of the file from tape to disc or disc to
tape may be necessary. The contents of the file may be listed with
a dump program. Data records in error or missing may be changed,
deleted, or added to the file with a data file update routine. If
the data point locations are not in X-Y co-ordinates, but instead in
the form of geographical or survey parameters, another routine must
be used to calculate an X-Y map position for every point and create
a new data file with this new location information.
A routine
should be available to provide a statistical summary of the
distribution of the raw data points and recommend a grid interval
parameter. This scan may be useful if the data are fairly randomly
distributed such that a good grid interval is not pre-determined by
a regular data spacing.
)
Numerical Surface Creation
Performing the numerical approximation to the surface represented
by the data for a regular grid is the function of the next major
program. The usual method used is a plane interpolation and fit
that will produce a surface passing exactly through the raw data
values. This is a very critical part of the processing as it must
not introduce artificial highs and lows and it must effectively
handle edge effects at the boundaries of the map area. The result
is called the GRID FILE. The facility of handling large grids and
large numbers of data points through internal segmenting and merge
operations is necessary but not many service centers have this
ability. In its absence, the data must be manually segmented with
sufficient overlap to avoid ugly anomalies at the joins. Again,
numerous utility routines are usually available to facilitate
handling of the GRID FILE. The transfer of grids from tape to disc
or disc to tape is handled as in data preparation. Errors in
individual grid values may be corrected by an update program or a
new grid may be created from a subset of an existing grid.
Alternatively, a new grid may be created from an existing grid by
halving the grid interval and interpolating new grid points between
existing ones.
Should data be already on a grid system but not in the required
format, it may be reformatted into a standard GRID FILE for
processing in the system by using a program which by-passes the data
preparation stage.
Once the desired grid surface has been created many routines
exist to perform mathematical operations upon the surface values.
Numerical Surface Operations
Once a
surface exists on a GRID FILE, the user has many options available
to help to extract all possible information from his data. A
regional surface for the data may be calculated, either by
evaluating a user supplied power series over a grid or by fitting
some specified order least squares orthogonal polynomial surface to
the data and evaluating either all or some of the resulting
co-efficient over the map area. The order of surface (i.e. the
highest power of X and Y) is usually from 2 to 4 to evaluate
regional dip and up to 8 or even 16 to evaluate more local
anomalies.
The grid
surface may be smoothed by a moving quadratic surface, a procedure
that is essentially a low-pass filter and may be considered to
produce a regional surface if the filter effect is large enough.
Such filtering operations as low-pass, high-pass, strike,
continuation and derivatives may be performed by supplying the
appropriate co-efficients to a ring operator program. Filters of
completely arbitrary shape and weighting may be designed.
Operations
on two sets of grid values such as addition, subtraction,
multiplication, division or comparison can then be performed. For
example, residual anomaly maps may be created by subtracting the
regional surface from the raw surface. In addition to ring operator
and polynomial surface methods to filter data, Fourier analysis
techniques are also available. This requires considerably more
machine time and programming expense as well as a very knowledgeable
user, but results are more accurate and have fewer spurious
anomalies.
The last
option available is usually integration of the surface. Volume to a
bounding plane, surface area or projected area to a plane may be
calculated. This could be of great use in reserves in place
calculation.
Having
created the desired numerical surface by any suitable means, the
user then has available many display options for either line
printers or automatic plotters.
)Di
Display Options
Certainly the most familiar and quantitatively the most useful
means of displaying three dimensional surfaces in a two-dimensional
plane is the contour map. A contour map may be produced for the
printer or for a digital or analog plotter. An extremely useful
facility is the ability to produce contour maps in stereographic
pairs, which can be a valuable aid to geophysical and geological
interpretation. The user may choose to display his surface as a
projection, either in perspective or isometric views. These types
of outputs can be very helpful in showing up trends and linears that
may be very hard to identify in an ordinary contour map.
Linear
sections of the surface may be taken with a cross section routine.
Profiles such as these are very useful in determining anomaly shapes
and sizes and in calculations of such parameters as depth to
basement, body size and depth of burial, etc. This program is also
well suited to the display of well information, as many horizons may
be plotted for the same section with nearby well control being
overplotted on the profiles.
The actual
grid values may be posted on the plot, for error checking or
hand-contouring. A similar posting ability exists to output the
values from the data file. This again may be done for purposes of
error checking; however, the plotter routine more likely will be
used prior to hand contouring or for over posting upon a contour map
to indicate raw data locations and values.
Finally, as
an aid to location of anomalies geographically, a program should be
available to generate upon a pre-posted or contoured map or upon an
overlay, a grid of geographical co-ordinates. The co-ordinates may
form a Universal Transverse Mercator grid or the major
latitude-longitude points on the map sheet. Clearly, one doesn’t
use every program indiscriminately, but chooses a route through the
system to optimize data enhancement consistent with the quality of
the input data and the processing cost. In order to make effective
use of any of the routines, the input data must be house-cleaned and
all basic geophysical or geological corrections made prior to any
attempt to contour or analyze the data. The following section
discusses Aeromagnetic and Gravity processing systems as commonly
used in petroleum applications.
AEROMAGNETIC DATA PRE-PROCESSING
The digital
processing of aeromagnetic data may also be conveniently broken down
and discussed in four phases: data recovery, recovery edit, error
correction and mapping. These phases are basic to the processing of
all flight line or discreet point exploration data. A flow chart of
a typical aeromagnetic processing system is shown below.
Data RecoveryThree forms of information may be provided by an aeromagnetic
survey. First, there is of course, the recording of the magnetic
value of the earth’s field. This data is valuable only if properly
correlated with the information as to the position of the flight
lines along which the data was recorded. For very accurate surveys,
information will also be required on diurnal variations as observed
at a fixed ground monitor within the survey area.
The magnetic field values are usually presented to the system as
digital values sampled at a constant time increment along the flight
line. The data values at this stage need not occur at integer time
values but may be asynchronous to the time (fiducial) count.
Digitally recorded values from the field already satisfy this
condition as a rule. Thus, the only data recovery problem, other
than recovery of bad parity or lack of data on tape, will be
transcription of the data to cards. Analog field recordings must be
digitized at some convenient sample interval before transcription to
cards, by some semi-automatic or manual method. The values on the
cards need not be the true field value, provided the true field may
be recovered by simple mathematical operations such as addition or
multiplication by a constant. For card economy, up to 15 values may
be transcribed on one card.
The position of a flight line relative to the rest of the survey
is generally recovered from a photo mosaic base map with the
knowledge of the fiducial count for every given photo center of the
mosaic. If the true geographic position of these photo centres is
not directly available, they may be assigned an arbitrary X-Y
co-ordinate position relative to some origin and set of coordinate
axis. Thus the position of a flight path may be fully defined by
ascertaining the initial and final fiducial values for a line, its
direction, and the fiducial values for a line, its direction, and
the fiducial count and X-Y position of several photo centres along
the flight path.
Information as to the diurnal variation of the earth’s magnetic
field may be obtained from the magnitude of the fluctuation of the
field as recorded at a fixed ground monitor. In many cases, this
variation is of such a long period that digitizing of this record
every several minutes will be sufficient to define the correction
required to compensate for this effect. The system should not
require that this monitor be digitized at equal increments in time,
so that only major inflections of the record need to be recovered.
Recovery Edit
Once all the data has been recovered in digital form it is
important that it be carefully edited to remove the almost
inevitable errors in digitizing and transcription.
Since the mapping phase is costly relative to any other phase,
reruns caused by correctable data errors can make computer
processing of aeromagnetic data uneconomical.
The magnetic field values may be edited by either producing a
profile of the line or by scanning the line for point to point
variation and proper number of readings. This should point out gross
errors in digitizing. Another program should scan the data in
standard digitized form for sequential variations in the magnetic
field exceeding 100 gammas or some predetermined rate of change and
flag such values for possible error. If the data is synchronous
with the fiducial count, a comparison of the number of points
expected as calculated from start and end fiducials and the number
of data points should point out missing values.
The flight path recovery may be edited by either plotting the flight
lines at the same scale as the base map for overlay comparison, or
by scanning the fiducial values for proper sequence and the X-Y
co-ordinates for expected direction and variance from linearity.
The diurnal data is composed of so few readings that it is probably
best edited by hand.
Error Correction
Assuming that the data has been properly edited for digitizing
errors, there remain three major sources of error in the magnetic
field values. These are errors due to diurnal variation in the
earth’s field, heading error due to the relation of the flight line
bearing to the gradient of the magnetic field, and error due to
instrument drift in time.
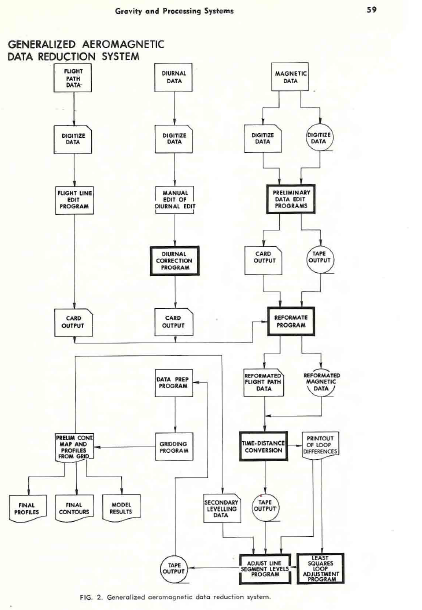
Generalized aeromagnetic data reduction system.
The first correction program calculates the correction required
for the first two errors. It uses the digitized diurnal records to
estimate the diurnal correction required at every photo centre, and
adds to it a correction for heading error as a cosine function of
the flight bearing and a user specified maximum heading error. A
new set of photo centre position data will be created with this
correction appended that may be used as input to the next stage.
Instrument drift will generally be seen as a difference in level
between flight lines.
For short flight lines the drift in a line may be said to be
negligible and a bulk correction to each line may be applied to
bring the survey to a common datum. If more than one tie line is
present, the drift corrections may be made on a time varying basis
to adjust the flight lines to the tie lines, assuming accurate
recovery of
the tie line-flight line intersections.
Estimation of level corrections in the absence of accurate tie
line information requires that the unlevelled data be processed
through the mapping phase to a rough grid and contour map. From
this map a region of
low magnetic gradient crossing all
lines, or several regions covering overlapping groups of lines may
be chosen. Given these regions, profiles perpendicular to the
flight lines through the low gradient may be plotted. If these show
oscillation across flight lines dues to levelling error, then the
difference between the smoothed and plotted profile at flight line
intersections is used as the level correction.
If good tie line information is available, a least squares
network adjustment at flight path intersections can be computed and
used as the level correction. Once the required corrections have
been calculated, the magnetic data and positional information is
re-formatted into one common form for input to the time to distance
conversion program.
This will input the raw magnetic data, photo centre positions and
corrections and bulk line level corrections. The corrections will
be applied (interpolated from photo centre corrections) and X-Y
co-ordinate positions assigned to each magnetic value and a formatted
tape produced. This output tape is then ready to enter the mapping
phase of aeromagnetic processing.
Mapping
The functions of the mapping phase are to interpolate the randomly
(almost) distributed data onto a regular grid, if desired perform
operations such as two dimensional filtering or surface operations,
and output the data in the form of a contour map, using the mapping
system previously described.
GRAVITY DATA PREPROCESSING
Basic gravity data processing to evaluate the Bouguer anomaly is
well documented. However, a file oriented system incorporating these
calculations with output compatible with a standard gridding,
contouring and evaluation system is not always available. A flow
chart of such a system is shown in the image below.
In a typical system, the Bouguer anomaly is calculated first, in
the following steps:
1)
Drift correct elevation data from barometric readings or loop tie
vertical survey data.
2)
Calculate latitude and longitude of stations from survey data.
3)
Build data file of raw data (meter readings, barometric readings,
location co-ordinates, time, station number).
4)
Using known base stations, apply drift correction to gravity
data.
5)
Calculate and apply meter corrections, latitude corrections,
elevation corrections (water depth and Eotvos corrections if data
from ship borne survey).
6)
Output to data file.
From there, various utility routines must be available to print
results by loops or by station numbers, to update a file or abstract
a portion of a file, and to change the Bouguer density without
recomputing the entire survey.
Terrain corrections may be necessary and this may be facilitated by
the computer in one of two ways. One approach is to enter the
evaluations of each segment of the Hammer chart for each station and
allow the computer to calculate, sum, and apply the terrain effect
of all segments. This method is the cheapest and most effective if
station spacing is far apart (e.g. 4 - 6 km), and elevation control
is poor.
Where elevation control is very good and station spacing is close
(e.g. 250 – 500 ft), the method normally used is to digitize the
elevation data on a grid about the same size as the data spacing.
The gravitational effect of each prism, bounded by the grid lines is
computed and added to the Bouguer value at the station. Due to the
number of computations involved, it may be necessary to interpolate
a finer grid near the station and group prisms together farther from
the station to obtain a compromise between accuracy and computing
time.
The output from any of these options can then be entered directly
into the gridding and contouring system for display and analysis.
The most common results desired, aside from the Bouguer anomaly map,
are profiles perpendicular to strike or anomaly axis and regional
and residual surfaces. The profiles are often matched to synthetic
models by successive approximation or else an iterative curve
fitting routine is applied which varies the depth, orientation, and
density contrast of some postulated causative body until a
reasonable fit to the observed profile is found.
There is no doubt that computer methods in gravity data reduction
can assist by providing accuracy, speed, and a master file which
simplifies subsequent work. There is no doubt either that unless
the user is very careful at the data collection and editing stage,
they can eliminate all these advantages by allowing the
programs to operate on erroneous data. Because errors are easily
found and corrected while computing and contouring by hand, it is
sometimes difficult to get used to the idea that the machine can’t
do this. All it can do is flag suspicious results and wait for
assistance. But, if the test for suspiciousness is not subtle
enough, the test may pass erroneous data, to be discovered later by
the interpreter as a rather “ungeologic” anomaly on a final computer
contoured map.
It cannot be emphasized enough that error detection and
correction are the most important part of all these systems and
cannot be done without intelligent people interacting with
well-designed programs.
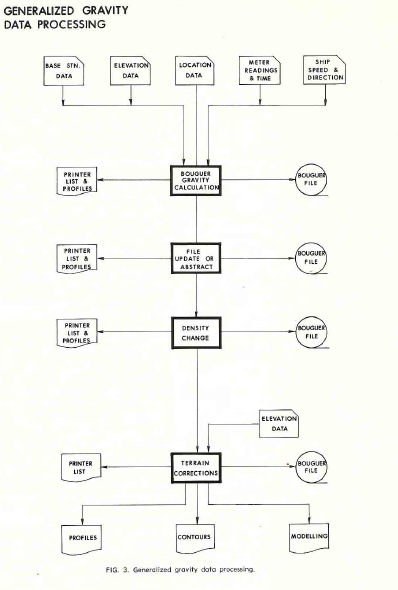
Generalized gravity data processing.
GRAVITY DATA REDUCTION MATH
Data reduction of large amounts of land or marine gravity data can
be accomplished with a program especially designed to handle the
variety of location, elevation, or water depth data, as well as
tables of gravity meter constants. Meter drift, loop and line tie
differences and running average filters can be applied. Results of
free air and Bouguer corrections are output to a file, which can be
updated, or used as input to computer contouring or profile
routines.
The mathematical formula used for the corrections are as published
by Grant and West in “Interpretation Theory in Applied Geophysics”
published by McGraw-Hill, 1956.
For land-based gravity surveys, these are:
1. G = 978049.0 * (1 + 0.005 288 4 * Sin2 L – 0.000
005 9 Sin2L)
2 . E = 0.09416 – 0.00090 * Cos (2*L) – 0.068 * 10-7
* H
3. B = -0.01276 * DENS * H
4. T = 0.005 * Ts * DENS
Where:
G = theoretical gravity at latitude L
E = elevation correction at latitude L for elevation H
B = Bouguer correction for replacement density DENS
T = terrain correction for T value of Ts at 2.00 g/cc for
replacement
density DENS
The Bouguer Anomaly is:
5. BG = Observed Gravity + E + B + T – G
For marine gravity surveys (moving platform), the equations are:
6. G = As above
7. B = 0.01276 * (DENS – DENSW) * W
8. E = 7.5074 * V * Cos L * Sin A – 0.004 16 * V^2
Where:
B = Bouguer correction for replacement density DENS and
water density
DENSW * water density for water at depth W
E = Eotvos correction for ship speed V at latitude L with course direction A
The Bouguer Anomaly is:
9. BG = Observed Gravity + B + E – G
The units of measurement used in the equations are as follows:
G = milligals
L i= degrees from Equator
H = feet
DENS = grams per cubic centimeter
DENSW = grams per cubic centimeter
Ts = gravity units (0.10 milligal)
W = feet
V = Knots
A = degrees from true North
If anyone
can provide equations in Metric Units, please contact me.
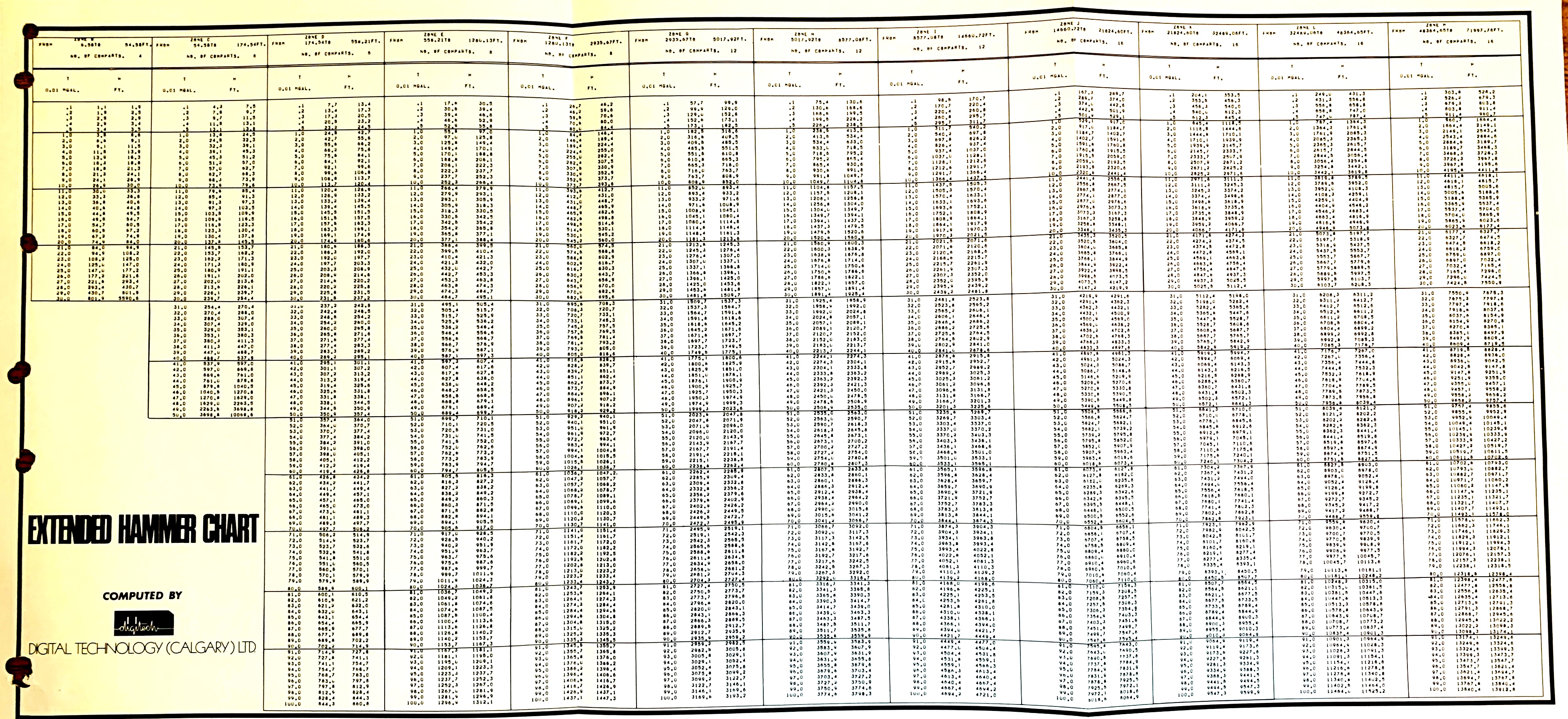
EXTENDED HAMMER CHART FOR TERRAIN CORRECTIONS
Manual calculation of terrain corrections was tedious and made use
of a shortcut called the Hammer Chart. It was first publishes as
“Terrain Corrections for Gravimeter Stations” by Sigmund Hammer,
Geophysics Vol. IV, No. 3 (1939) pp 184 – 194.
These early versions of Hammer Charts for computation of terrain
corrections for gravity data have been limited in their range of
elevations, T-values, and radii. In 1973,a computer program was
developed to compute extended tables of the standard form to any
value of T and to any radius. The attached chart is representative
of the results computed to a T value of 100 (where possible).
Download large scale image (3900x1800px) of the sample Extended
Hammer Chart
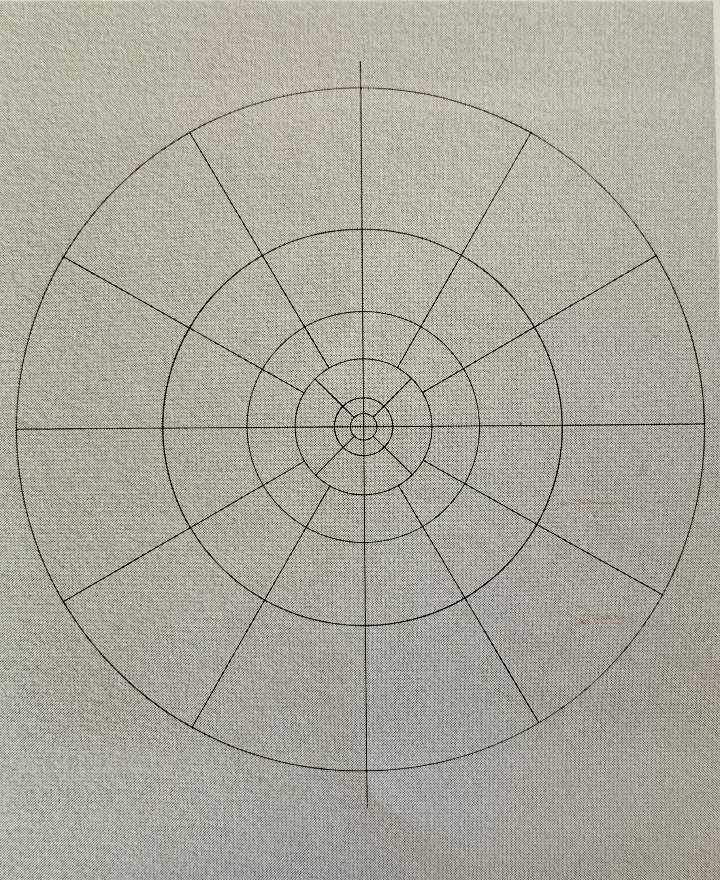
Schematic diagram of elevation cylinders for terrain
corrections using Hammer’s method
The formula used for the computation is from Sigmund Hammer’s1939
paper. as shown below:
Extended Hammer Equation.
Where:
Hj = height of cylindrical segment of one compartment
which produces a gravity effect .g0
R1 = inner radius of zone
R2 = outer radius of zone
a = ratio of outer to inner radius
n = number of compartments in the zone
g0 = 10^5 gals.
y = 6.670 * 10^8 dyne cm2 / gm2
j = any positive number
rho = rock density (2.00 gm/cc assumed)
This formula is exact and not the first few terms of a series
expansion.
Nomograph for Hammer Chart Calculations.
MAPPING EXAMPLES
This Section will discuss various examples with the view to
showing the following:
1)
Machine contour quality is satisfactory for a great many
applications.
2)
Regional-residual analysis using polynomial or smoothed surfaces
can aid in the identification of significant anomalies.
3)
That just like manual contouring, every contour package will
produce slightly different maps, given the same input data and the
same control parameters.
EXAMPLE 1: Formation Tops
The first example, shown in below (3 images) consists of posted
well top data for one horizon, with a third order trend (regional)
surface, and the residual after removal of the trend. As we can
see, the regional dip is to the west-southwest at the rate of about
50 feet to the mile. The residual anomaly map clearly shows closed
highs and lows relative to the regional dip, and if we refer to the
posted map, most of the wells will be found on the up dip (NW) side
of these high closures. If an explorationist intended to recommend
another well, it would be useful to have such a set of maps to
assist in picking the correct location. It is unfortunate that the
usefulness of such a map is directly proportional to the number of
wells already drilled, so that when we need it most we can’t make it
due to lack of control.
Posted and contoured well-top data.
Third order trend (regional) surface of well-top data.
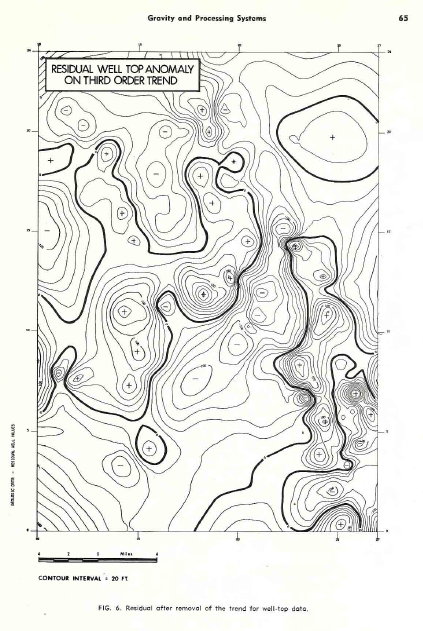
Residual after removal of the trend for well-top data.
EXAMPLE 2: Aeromagnetic Survey
The second example is from a portion of an aeromagnetic survey,
shown below (5 images). This is a highly complex intrusive in a
fairly flat regional and in order to look at small anomalies which
may be of interest a low pass filter was applied and subtracted from
the data to give the residual. Some linear features running
north-south and the east-west faults cutting them are more clearly
defined on the residual, although they were visible on the original
map.
Other display forms, such as the perspective view, and the flight
line profiles are useful in visualizing the total magnetic intensity
surface and should assist in interpretation by considering anomaly
shapes.
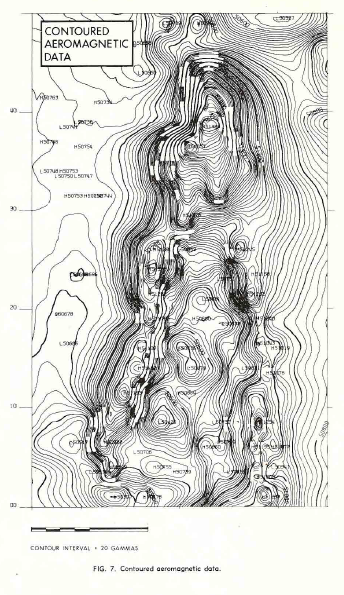
Contoured aeromagnetic data.
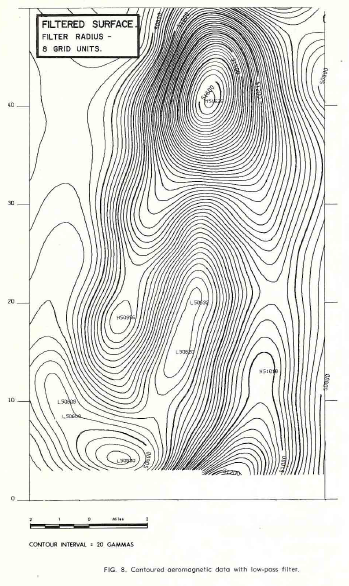
Contoured aeromagnetic data with low-pass filter.
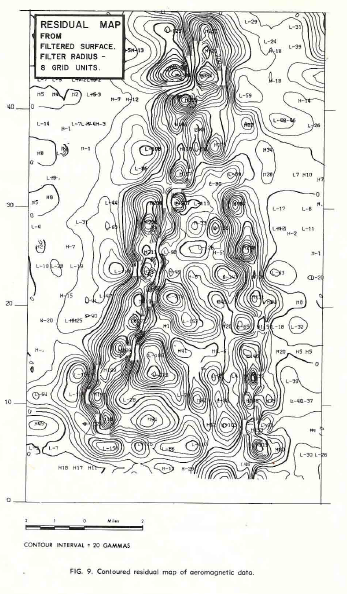
Contoured residual map of aeromagnetic data.
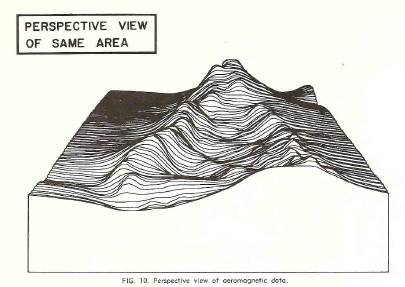
Perspective view of aeromagnetic data.
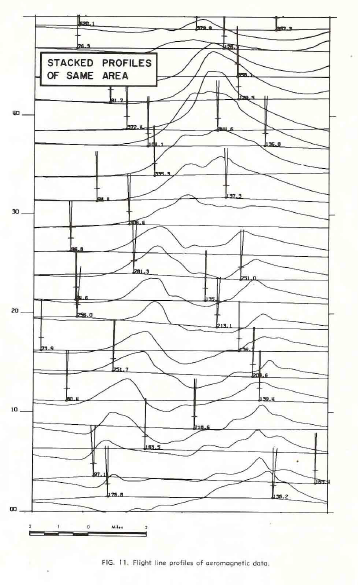
Flight line profiles of aeromagnetic data.
EXAMPLE 3: Gravity Data
The third example represents a portion of a gridded gravity survey
of the Bouguer anomaly, shown below (3 images). Again, a regional
surface was removed and a residual map reflecting the closures on
the regional was created. The residual is only 2.0 milligals so the
data reduction and editing prior to mapping were obviously
important.
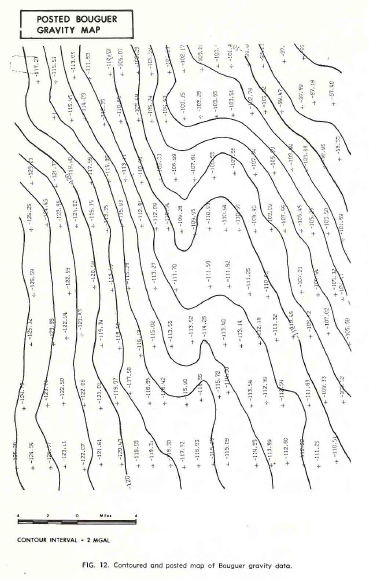
Contoured and posted map of Bouguer gravity data.
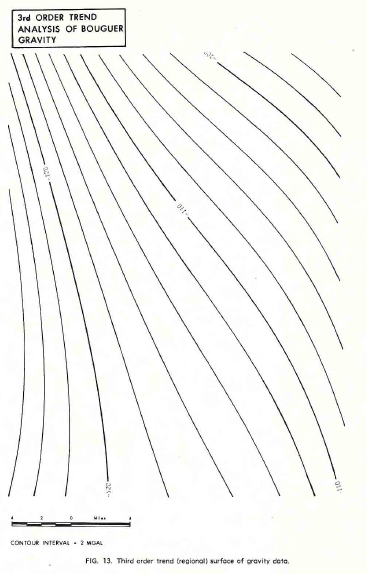
Third order trend (regional) surface of gravity data.
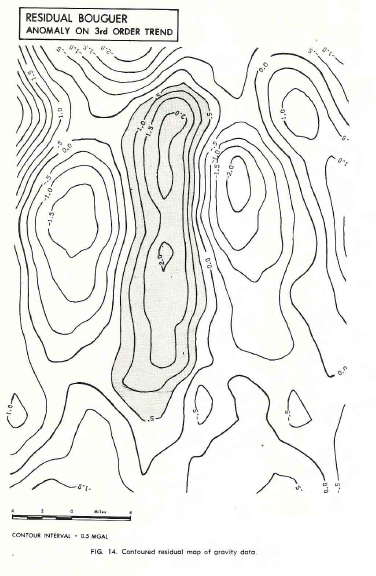
Contoured residual map of gravity data.
|

{kind=link}